
1ЁЂдДТыАВзАЧ§ЖЏ
$ mkdir -p ~/erobot_ws/src
$ cd ~/erobot_ws/src
$ git clone https://github.com/NatanBiesmans/lms5xx
$ cd ~/erobot_ws
$ catkin_make
зЂвтЃК
1]ЁЂЮёБидкдДЮФМўlms5xx_node.cppжаАбМЄЙтРзДяЕФIPЕижЗИФГЩздМКЕФIPЕижЗ
2]ЁЂЭЌЪБдкinlucdeЮФМўМаЯТАбЭЗЮФМўSickLMS5xx.hhжаipЕижЗКЭЖЫПкКХИФГЩздМКЕФ
3]ЁЂШЅЕНФПТМЯТЃЌдйДЮcatkin_make
2ЁЂаоИФIP
МЄЙтРзДяЕФIP
LMSxxxМЄЙтРзДяЕФЕФФЌШЯIPЕижЗЪЧ192.168.0.1,ЭЈГЃгІИУИФЮЊздМКЫљЩшжУЕФIPЕижЗ
ШчвЊаоИФIPЃКВЮПМhttp://www.linuxdiyf.com/linux/32639.html
UbuntuЕФIP
дкUbuntuЯТ“БрМСЌНг”——“вдЬЋЭј”——“ЬэМг”ДДНЈвЛИіУћЮЊlmsxxxЕФгаЯпСЌНг
ЪжЖЏЩшЖЈзгЭјбкТыЮЊ255.255.255.0ЃЌЪжЖЏЩшЖЈIPЮЊ192.168.0.10ЃЈ192.168.0.2~192.168.0.254ЖМааЃЉ
етбљДЫIPгыLMSxxxЩшБИIPОЭДІгкЭЌвЛЭјЖЮСЫ
3ЁЂВтЪд
МЄЙтРзДяЭЈЙ§ЭјЯпСЌНгЕНubuntuЕчФд
аТжеЖЫЃЌжДаа
$ roscore
аТжеЖЫЃЌжДаа
$ rosrun laser_node laser_node
аТжеЖЫЃЌжДаа
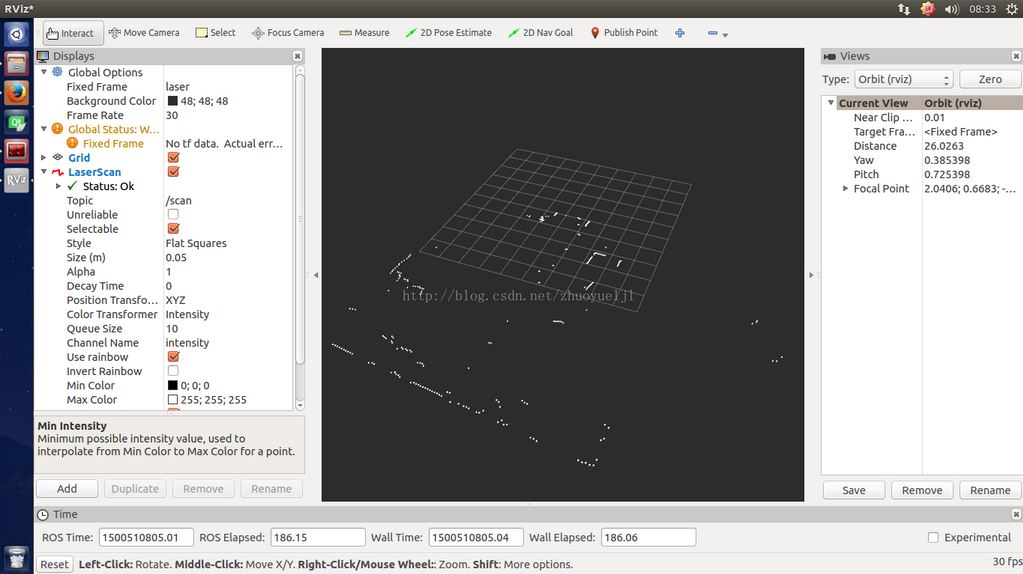
$ rosrun rviz rviz
зѓЛїADD-->by topic-->бЁдёLaserScan
етЪБЛсЗЂЯжstatus errorЃЌдйНЋзѓЩЯНЧЕФFixedFrameКѓУцЕФжЕИФЮЊlaserМДПЩЁЃ
БОЮФгРОУИќаТЕижЗЃКhttp://www.linuxdiyf.com/linux/32640.html