
在Ubuntu系统基于ROS使用废旧Android手机摄像头搭建监控设备
之前有介绍了一些使用Android手机获取ROS中传感器,图像以及控制机器人小车的案例;
这里主要介绍如何让ROS获取手机摄像头数据并使用,这样就不用usb_cam等,并且大部分都有手机;
实验成本低,简洁易行。
手机端需要安装RTSP Server等IP Camera类型APP;
PC配置为Ubuntu 16.04 + ROS Kinetic,(14.04+indigo也可行)。
首先,下载功能包并配置,编译等,如下:
http://download.csdn.net/detail/zhangrelay/9799960
$ catkin_make
然后,source xxx/devel/setup.bash:
查看手机IP地址,并配置:
export ROCON_RTSP_CAMERA_RELAY_URL=rtsp://192.168.3.66:5540/ch0
注意,依据自己的端口和情况进行配置。如有必要配置ACL等。
这里用到的ROS功能包是rocon_rtsp_camera_relay:
文件组织如下:
.
├── CHANGELOG.rst
├── CMakeLists.txt
├── env-hooks
│ └── 25.rocon-rtsp-camera-relay.sh.em
├── include
│ └── rocon_rtsp_camera_relay
│ └── rocon_rtsp_camera_relay.hpp
├── launch
│ └── rtsp_camera_relay.launch
├── package.xml
├── rapps
│ └── image_stream
│ ├── image_stream.launch.xml
│ └── image_stream.rapp
└── src
├── main.cpp
└── rocon_rtsp_camera_relay.cpp
7 directories, 10 files
main.cpp
#include <ros/ros.h>
#include <rocon_rtsp_camera_relay/rocon_rtsp_camera_relay.hpp>
int main (int argc, char** argv)
{
ros::init(argc, argv, "rtsp_camera_relay");
ros::NodeHandle pnh("~");
std::string video_stream_url, user, password;
pnh.getParam("video_stream_url", video_stream_url);
rocon::RoconRtspCameraRelay rtsp(pnh);
ROS_INFO("Rtsp Camera : Initialising..");
if(!rtsp.init(video_stream_url))
{
ROS_ERROR("Rtsp Camera : Failed to initialise stream");
return -1;
}
ROS_INFO("Rtsp Camera : Initialised");
rtsp.spin();
ROS_INFO("Rtsp Camera : Bye Bye");
return 0;
}
可以知道只需要配置合适IP即可使用非常方便。
rocon_rtsp_camera_relay.cpp参考源码。
具体使用说明:
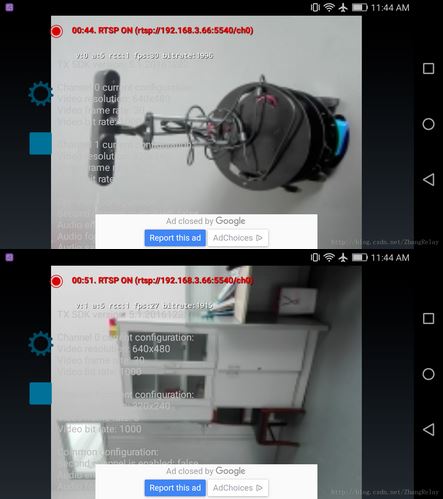
1.先启动手机端:
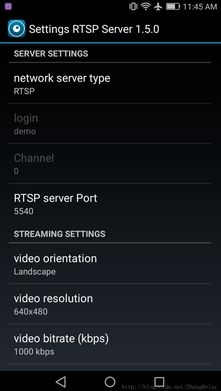
配置后打开:
2.PC端
运行如下命令:
$ roslaunch rocon_rtsp_camera_relay rtsp_camera_relay.launch --screen
如果没有报错,可以看到下面结果,如果报错,依据错误排查问题:
... logging to /home/relaybotbox/.ros/log/7fabe4ea-15c5-11e7-bd22-00e0b4159b09/roslaunch-relaybotbox-desktop-10439.log
Checking log directory for disk usage. This may take awhile.
Press Ctrl-C to interrupt
Done checking log file disk usage. Usage is <1GB.
started roslaunch server http://192.168.3.18:34861/
SUMMARY
========
PARAMETERS
* /rosdistro: kinetic
* /rosversion: 1.12.6
* /rtsp_camera_relay/video_stream_url: rtsp://192.168.3....
NODES
/
rtsp_camera_relay (rocon_rtsp_camera_relay/rocon_rtsp_camera_relay_node)
auto-starting new master
process[master]: started with pid [10450]
ROS_MASTER_URI=http://localhost:11311
setting /run_id to 7fabe4ea-15c5-11e7-bd22-00e0b4159b09
process[rosout-1]: started with pid [10464]
started core service [/rosout]
process[rtsp_camera_relay-2]: started with pid [10472]
[ INFO] [1490932367.742812354]: Rtsp Camera : Initialising..
[ INFO] [1490932369.181637729]: Rtsp Camera : Initialised
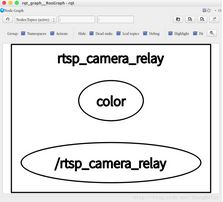
这里可以看到,最后显示Initialised,已经可以ROS已经可以查看手机的摄像头视频了:
使用一些工具可以查看具体信息,如下:
$ rostopic list
/rosout
/rosout_agg
/rtsp_camera_relay/camera_info
/rtsp_camera_relay/image
/rtsp_camera_relay/image/compressed
/rtsp_camera_relay/image/compressed/parameter_descriptions
/rtsp_camera_relay/image/compressed/parameter_updates
/rtsp_camera_relay/image/compressedDepth
/rtsp_camera_relay/image/compressedDepth/parameter_descriptions
/rtsp_camera_relay/image/compressedDepth/parameter_updates
/rtsp_camera_relay/image/theora
/rtsp_camera_relay/image/theora/parameter_descriptions
/rtsp_camera_relay/image/theora/parameter_updates
/rtsp_camera_relay/status
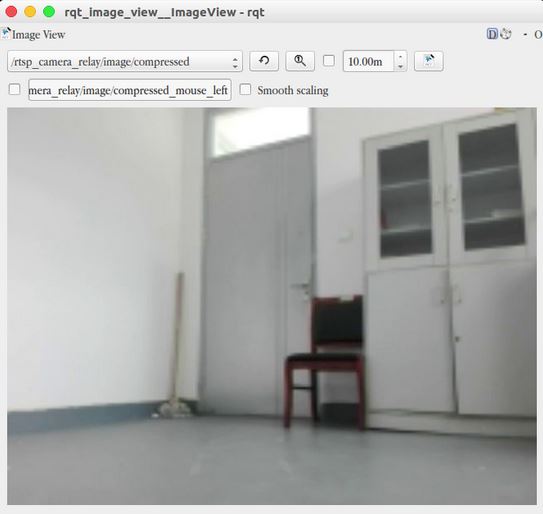
手机不仅可以很方便的获取ROS中摄像头的数据,ROS也可以很方便的获取手机摄像头的数据。
概述
实时流协议(即RTSP)是IP摄像机(例如foscam)使用的网络控制协议。该包桥接从ip摄像机转换流图像,并将其提供为ROS主题。
安装
> sudo apt-get install ros- <distro> -rocon-rtsp-camera-relay
执行
> export ROCON_RTSP_CAMERA_RELAY_URL = rtsp://您的IPCAM URL
> roslaunch rocon_rtsp_camera_relay rtsp_camera_relay.launch - 屏幕
