安装流程:
1.安装Ubuntu14.04(Trusty),将安装镜像文件制作U盘镜像,进入BIOS或WIN10下进入设置->更新和安全->恢复->高级启动,使用U盘启动,完成Ubuntu14.04(Trusty)的安装。
2.安装ROS(indigo),参考文件http://wiki.ros.org/indigo/Installation/Ubuntu(英文原版)、http://wiki.ros.org/cn/indigo/Installation/Ubuntu(中文翻译);也有自己写的中文版的配置教程,我是照着这个配置的一次成功:在Ubuntu14.04中安装ROS Indigo
1)配置Ubuntu软件更新选项:
System Settings -> Software & Updates 选项勾选如下所示
main
universe
restricted
multiverse
2)设置软件源(sources.list):
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu trusty main" > /etc/apt/sources.list.d/ros-latest.list'
3)设置密钥:
wget https://raw.githubusercontent.com/ros/rosdistro/master/ros.key -O - | sudo apt-key add -
4)安装
sudo apt-get update
sudo apt-get install ros-indigo-desktop-full
(完全安装时的工具包括ROS,rqt,rviz,robot-generic libraries,2D/3D simulators,navigation and 2D/3D,perception。)
5)初始化rosdep
sudo rosdep init
rosdep update
6)设置环境
echo "source /opt/ros/indigo/setup.bash" >> ~/.bashrc
source ~/.bashrc(使环境变量设置立即生效)
7)安装rosinstall(使用这个命令可以轻松的下载许多ROS软件包。)
sudo apt-get install python-rosinstall
3.安装所有依赖项
sudo apt-get install -y google-mock libboost-all-dev libeigen3-dev libgflags-dev libgoogle-glog-dev liblua5.2-dev libprotobuf-dev libsuitesparse-dev libwebp-dev ninja-build protobuf-compiler python-sphinx ros-indigo-tf2-eigen libatlas-base-dev libsuitesparse-dev liblapack-dev
4.安装ceres solver,下载安装在主目录下,由于googlesource.com需要FQ,这里使用hitcm(张明明)的github地址
# Build and install Ceres.
# git clone https://ceres-solver.googlesource.com/ceres-solver
# cd ceres-solver
git clone https://github.com/hitcm/ceres-solver-1.11.0.git
cd ceres-solver-1.11.0
mkdir build
cd build
cmake .. -G Ninja
ninja
ninja test
sudo ninja install
5.安装cartographer,下载安装在主目录下,这里同样使用的是hitcm(张明明)的github地址
# Build and install Cartographer.
git clone https://github.com/hitcm/cartographer.git
cd cartographer
mkdir build
cd build
cmake .. -G Ninja
ninja
ninja test
sudo ninja install
6.安装cartographer_ros,这里使用的是hitcm(张明明)的github地址,由于google官方的教程需要FQ下载一些文件,因此容易失败,经验证hitcm(张明明)对原文件进行了少许修改后可以成功安装,在他的修改中核心代码不变,只修改了编译文件。
We recommend using wstool and rosdep. For faster builds, we also recommend using Ninja.
# Install wstool and rosdep.
sudo apt-get update
sudo apt-get install -y python-wstool python-rosdep ninja-build
# Create a new workspace in 'catkin_ws'.
mkdir catkin_ws
cd catkin_ws
wstool init src
# 下载到catkin_ws下面的src文件夹下面
cd src
git clone https://github.com/hitcm/cartographer_ros.git
# 然后到catkin_ws下面运行catkin_make安装
cd
cd catkin_ws
catkin_make,可能会报以下错误:Fatal error: pcl/conversions.h: No such file or directory.,执行sudo apt-get install ros-indigo-pcl-conversions,再次catkin_make即可
7.source ./devel/setup.bash
注意: 如果每次打开一个新的终端时ROS环境变量都能够自动配置好(即添加到bash会话中),那将会方便得多:
echo "source ~/catkin_ws/devel/setup.bash" >> ~/.bashrc
source ~/.bashrc
如果你只想改变当前终端下的环境变量,你可以执行命令:
source ~/catkin_ws/devel/setup.bash
8.运行DEMO
Now that Cartographer and Cartographer’s ROS integration are installed, download the example bags (e.g. 2D and 3D backpack collections of the Deutsches Museum) to a known location, in this case ~/Downloads, and use roslaunch to bring up the demo:
# Download the 2D backpack example bag.
wget -P ~/Downloads https://storage.googleapis.com/cartographer-public-data/bags/backpack_2d/cartographer_paper_deutsches_museum.bag
# Launch the 2D backpack demo.
roslaunch cartographer_ros demo_backpack_2d.launch bag_filename:=${HOME}/Downloads/cartographer_paper_deutsches_museum.bag
# Download the 3D backpack example bag.
wget -P ~/Downloads https://storage.googleapis.com/cartographer-public-data/bags/backpack_3d/cartographer_3d_deutsches_museum.bag
# Launch the 3D backpack demo.
roslaunch cartographer_ros demo_backpack_3d.launch bag_filename:=${HOME}/Downloads/cartographer_3d_deutsches_museum.bag
# Download the Revo LDS example bag.
wget -P ~/Downloads https://storage.googleapis.com/cartographer-public-data/bags/revo_lds/cartographer_paper_revo_lds.bag
# Launch the Revo LDS demo.
roslaunch cartographer_ros demo_revo_lds.launch bag_filename:=${HOME}/Downloads/cartographer_paper_revo_lds.bag
# Download the PR2 example bag.
wget -P ~/Downloads https://storage.googleapis.com/cartographer-public-data/bags/pr2/2011-09-15-08-32-46.bag
# Launch the PR2 demo.
roslaunch cartographer_ros demo_pr2.launch bag_filename:=${HOME}/Downloads/2011-09-15-08-32-46.bag
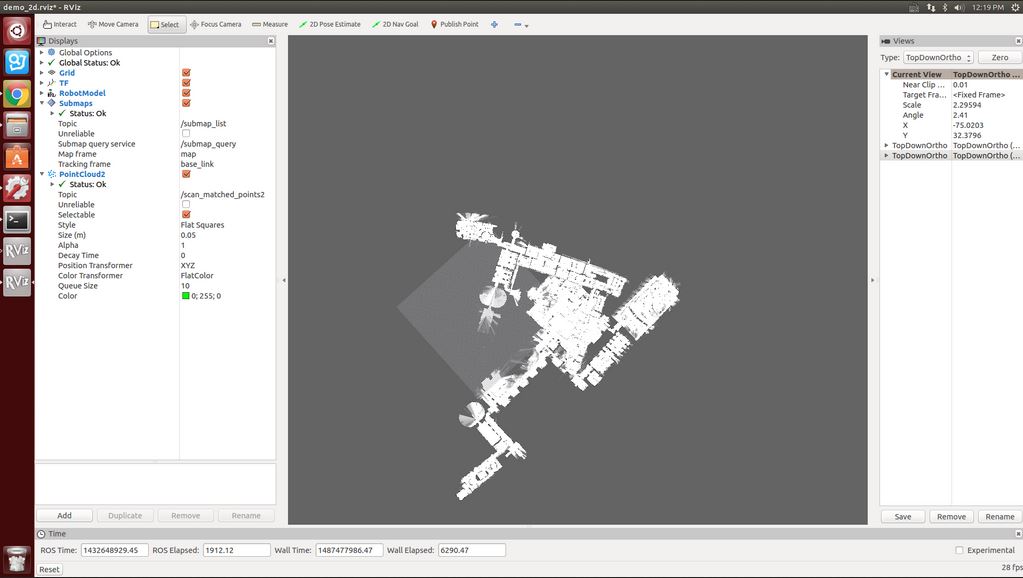
The launch files will bring up roscore and rviz automatically.
附2D-slam demo的效果图: