1、北醒雷达的驱动有一些不是很稳定的版本,使用之前一定跟北醒的工作人员联系好确定好驱动版本,我这里驱动的文件夹是serial_parse_publish。
2、安装ROS,可参考http://www.linuxdiyf.com/linux/26761.html进行安装,Ubuntu14.04的应该安装ROS-Indigo版本,Ubuntu16.04应安装ROS-Kinetic版本,如已安装可跳至第三步。
3、在Ubuntu的{HOME}目录下,执行指令:
mkdir -p ~/turtlebot_ws/src
cd ~/turtlebot_ws/src
4、将serial_parse_publish文件夹放到~/turtlebot_ws/src目录下,然后在终端将目录切换至~/turtlebot_ws目录下执行:
catkin_make
5、添加环境变量,在~/.bashrc最后添加一行,执行:
source /home/username/turtlebot_ws/devel/setup.bash,其中username是Ubuntu用户的名字
6、刷新配置,执行:
source ~/.bashrc
7、插上雷达,检查端口权限,执行:
ls -l /dev |grep ttyUSB
8、设置端口权限666,执行:
sudo chmod 666 /dev/ttyUSB0
9、将包名serial_parse_publish加入到ROS_PACKAGE路径中,执行:
echo "export ROS_PACKAGE_PATH=~/turtlebot_ws/src:${ROS_PACKAGE_PATH}" >> ~/.bashrc
. ~/.bashrc
10、启动ROS,执行
roscore
11、打开新终端,运行雷达节点,执行:
rosrun serial_parse_publish_360 DESerialPort_node_360。
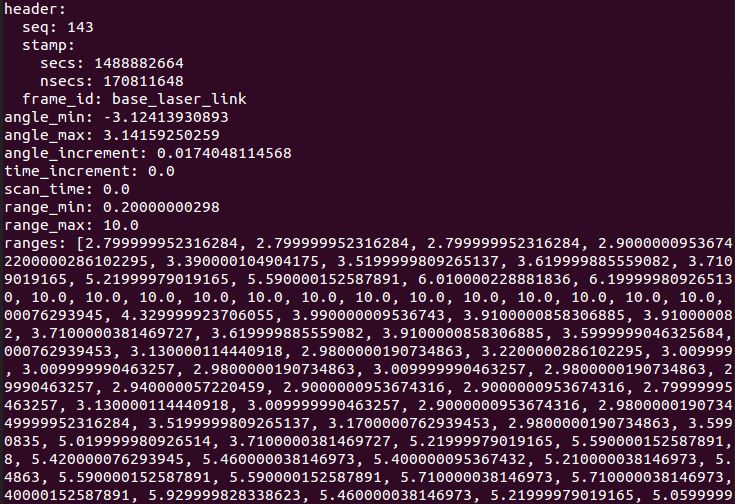
12、想看数据可以在终端输入rostopic list,会看到一个叫/scan的topic,然后rostopic echo /scan即可看到雷达数据内容。见下图: