前言
SLAM现已被证明可有效应用于AR产品,Microsoft Hololens提供了有效验证和极好的产品。毋庸置疑,视觉与惯性传感器的融合提供了更好的用户体验。在还未完全理解融合机制的情况下,跑跑demo与作者的数据集对理解、移植甚至裁剪代码大大有帮助。
系统软硬件准备:
这个没什么特别要讲的,一台Win10电脑,装好Ubuntu 14.04虚拟机,是前提。我的工作平台如下所示。

安装依赖项
=CMake,
sudo apt-get install cmake
google-glog + gflags,
sudo apt-get install libgoogle-glog-dev
BLAS & LAPACK,
sudo apt-get install libatlas-base-dev
Eigen3,
sudo apt-get install libeigen3-dev
SuiteSparse and CXSparse,
sudo apt-get install libsuitesparse-dev
Boost,
sudo apt-get install libboost-dev libboost-filesystem-dev
OpenCV 2.4-3.0: follow the instructions onhttp://opencv.org/ or install via
sudo apt-get install libopencv-dev
构建项目
从Github上下载或克隆OKVIS源代码。命令行下进入OKVIS目录。
mkdir build && cd build
cmake -DCMAKE_BUILD_TYPE=Release ..
make -j8
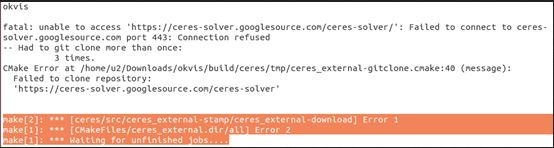
编译时可能因为无法登陆Google下载Ceres优化库而无法完成编译。
可以找到出错的地方,将文件里面的地址改为Github中Ceres的地址: https://github.com/ceres-solver/ceres-solver
make install
这样程序就安装好了。
运行程序
下载数据集,随便下载一个即可:http://projects.asl.ethz.ch/datasets/doku.php?id=kmavvisualinertialdatasets
在程序目录下运行如下命令行:
./okvis_app_synchronous /home/u2/Downloads/okvis/config/config_fpga_p2_euroc.yaml /home/u2/Downloads/okvis-dataset/mav0/
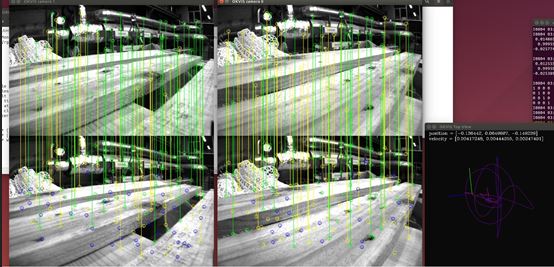
实验结果