
首先,先上原版参考:
1.http://wiki.ros.org/IDEs
2.https://github.com/ros-industrial/ros_qtc_plugin
3.http://www.ros.org/news/2016/07/qt-creator-ide-plug-in-for-ros.html
配置步骤主要分为三步:
1.https://github.com/ros-industrial/ros_qtc_plugin/wiki/1.-Setup-ROS-Qt-Creator-Plug-in
2.https://github.com/ros-industrial/ros_qtc_plugin/wiki/2.-Setup-Qt-Creator-for-ROS
3.https://github.com/ros-industrial/ros_qtc_plugin/wiki/3.-Debugging-Catkin-Workspace
可能还需要用到的:
1.https://github.com/lxde/qtermwidget
配置ROS Qt Creator Plug in简单流程:
1.下载并安装Qt,这个在ubuntu14.04和16.04一致。
参考:http://www.linuxdiyf.com/linux/21501.html
2.配置系统使用Qt(重要),其实也就两步,先在终端输入:
~$ sudo gedit /usr/lib/x86_64-linux-gnu/qt-default/qtchooser/default.conf
然后,在其中增加或修改为你当前的Qt环境:
/home/exbot/Rob_Soft/Qt/5.6/gcc_64/bin
/home/exbot/Rob_Soft/Qt/5.6/gcc_64/lib
模板是:
/home/<username>/Qt/<version>/gcc_64/bin
/home/<username>/Qt/<version>/gcc_64/lib
直接对照就行。
3.运行ROS Qt Creator Plug in安装脚本
第一种是用户模式,直接下载这个文件setup.sh(https://raw.githubusercontent.com/ros-industrial/ros_qtc_plugin/master/setup.sh)(右键另存),然后在终端运行
~$ bash setup.sh -u
第二种是开发者模式,下载功能包,然后运行其中的setup.sh,如下
~$ bash setup.sh -d
功能包地址:https://github.com/ros-industrial/ros_qtc_plugin
这里注意-u是用户,-d是开发者,分别为user和developer的意思。
然后祈祷不要出错,配置过程非常漫长,耐心是必备的。
4.其他细节在参考网址中都有具体介绍。完毕后在终端输入
~$ qtcreator
可见如下图(Ctrl+N):
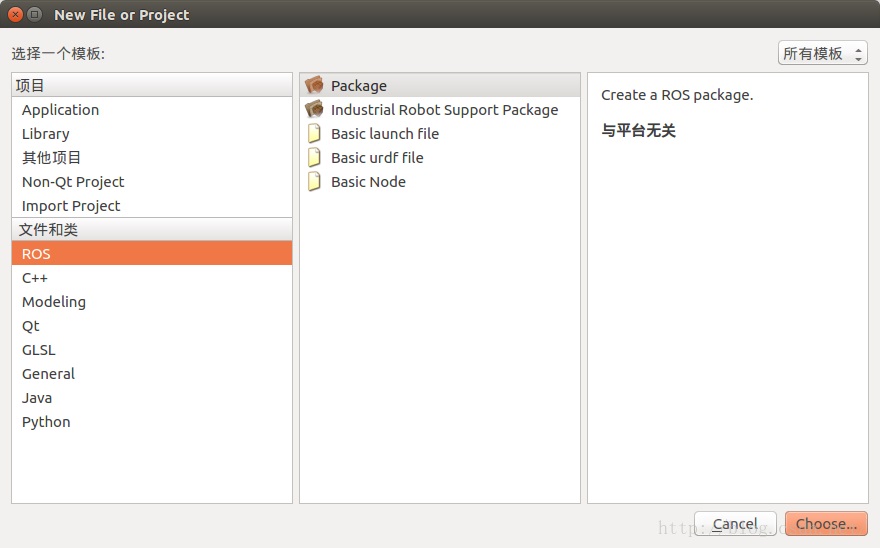
其他配置参考官网,indigo同样配置可行。