
ROS各个版本之间是否正常通讯做了如下试验进攻参看:
ubuntu16.10上安装ROS Kinetic(IP:192.168.2.109 主机名:long)
ubuntu14.04上安装ROS Jade(IP:192.168.2.107 主机名:Eric)
1、在ubuntu16的/etc/hosts 文件里添加
192.168.2.107 Eric
在~/.bashrc 文件里添加
export ROS_HOSTNAME=long
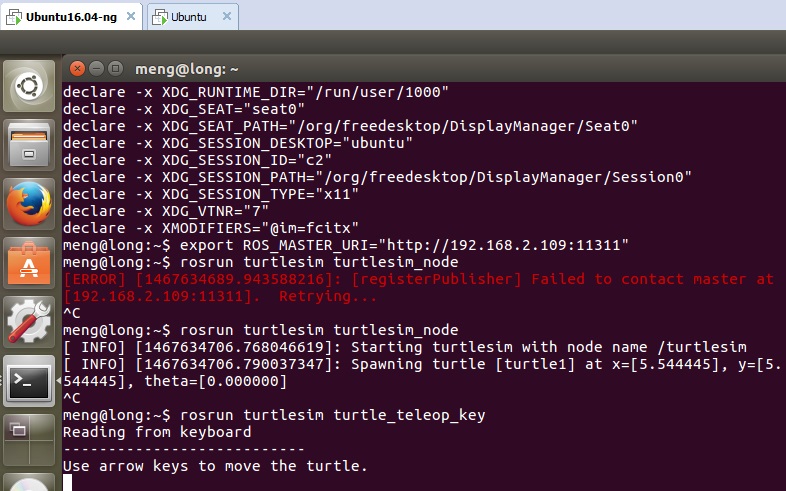
export ROS_MASTER_URI_=http://192.168.2.109:11311
然后重启网络 /etc/init.d/networking restart
2、在ubuntu14的/etc/hosts 文件了添加
192.168.2.109 long
在~/.bashrc 文件里添加
export ROS_HOSTNAME=Eric
export ROS_MASTER_URI_=http://192.168.2.109:11311
然后重启网络 /etc/init.d/networking restart
3、在一台电脑启动一个乌龟:
rusrun turtlesim turtlesim_node
另外一台启动:
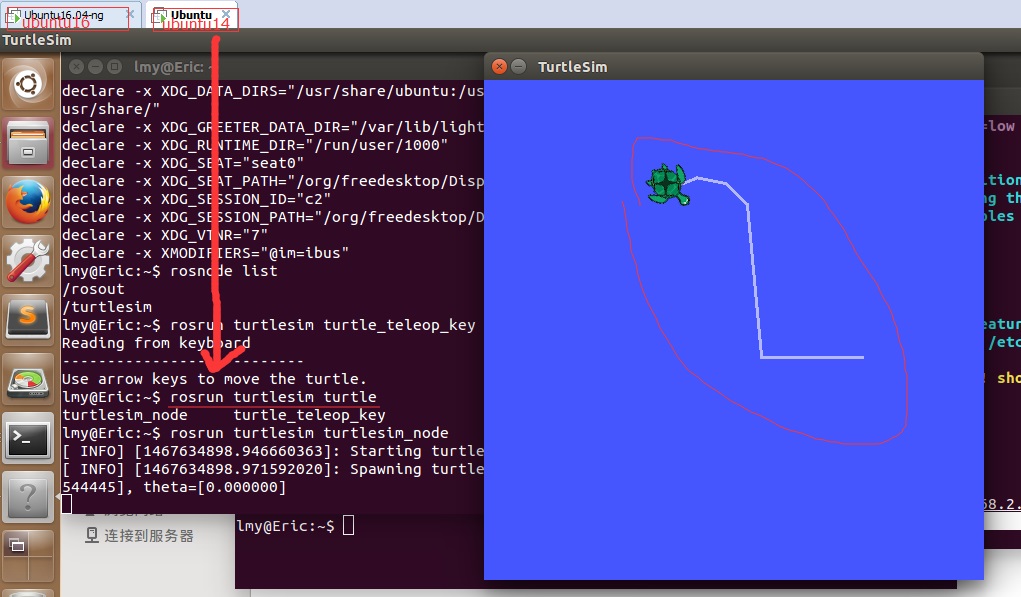
rosrun turtlesim turtle_teleop_key,
就可以实现遥控乌龟了。
注:启动之前可能需要source ~/.bashrc 一下,如未成功请检差IP和主机名是否弄错了。